Per arrivare a destinazione, gli AMR di MiR intraprendono il percorso migliore sulla base di una logica costi. Questo percorso viene normalmente denominato “GLOBAL PATH”. Per calcolare il global path, vengono presi come riferimento esclusivamente gli ostacoli fissi, che vengono evitati a priori, in quanto parte della mappa iniziale.
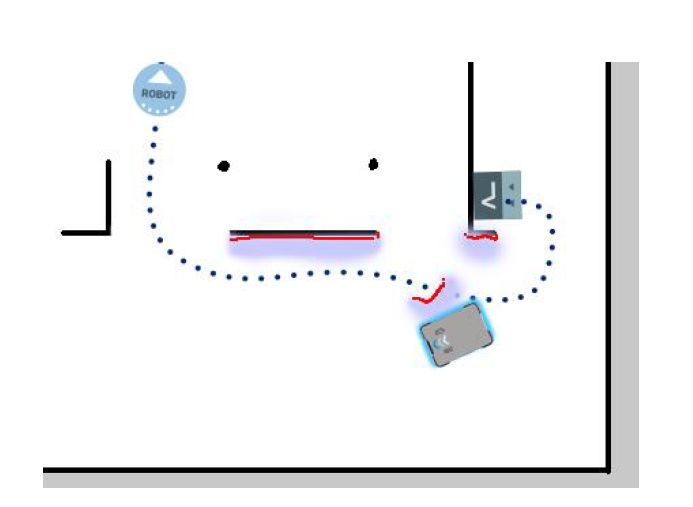
Se però, durante il percorso, l’AMR risconta la presenza di un altro ostacolo che non era previsto nella mappatura registrata, è in grado di ricalcolare il percorso adattando la posizione corrente del robot agli ostacoli intorno ad esso. In questo caso si parla di “LOCAL PATH”, un percorso ricalcolato continuamente mentre il robot è in movimento, tenendo sempre come riferimento le indicazioni del global path.
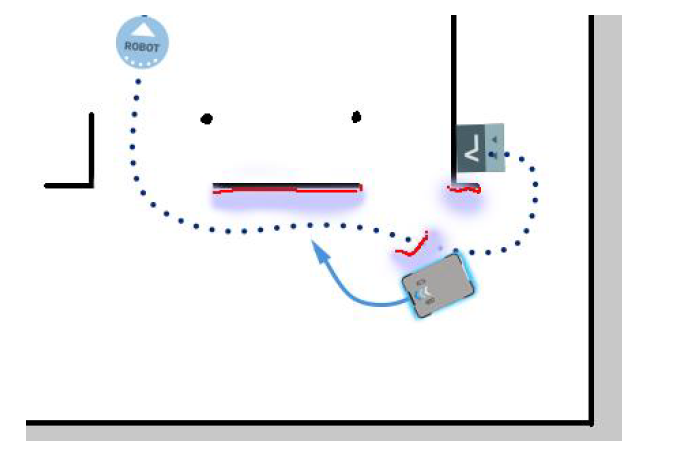
Terminato il processo di ricalcolo del percorso (LOCAL PATH), il MiR riprende l’esecuzione del global path calcolato all’avvio della missione.