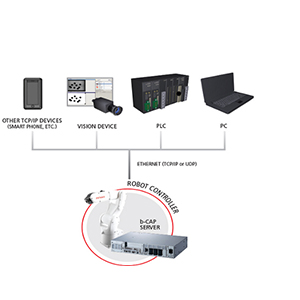
b-CAP si basa sul Transmission Control Protocol / Internet Protocol (TCP/IP)
Questo protocollo vi permette la connessione ai robot DENSO e ai dispositivi periferici utilizzando un PC, PLC o altro dispositivo che includa Ethernet TCP/IP o UDP.
Con b-CAP è possibile controllare il robot direttamente inviando una posizione di destinazione a brevi intervalli usando i propri calcoli di cinematica in tempo reale.
Lavora in modo completamente indipendente da qualsiasi piattaforma (iOS, Linux, Windows, ecc.) o linguaggio di programmazione.
Vantaggi chiave
- Controllo molto flessibile e potente tramite PC, PLC o altro apparecchio hardware applicabile TCP/IP o UDP
- Piattaforma e linguaggio di programmazione indipendenti
- Non è necessario imparare un nuovo linguaggio di programmazione
- Controllo in tempo reale dei robot