
Company: Fraunhofer Institute for Production Technology IPT
Industry: Medical research / Industry 4.0 application
DENSO Products Used: VS-087
Company Location: Germany
Website: http://www.ipt.fraunhofer.de
THE PROBLEM
Stem cell research is one of the most innovative areas in current medical research and plays a decisive part in developing new agents and drugs. Research is thereby based on cultivated stem cells, in particular mesenchymal stem cells, or MSCs. These are mature stem cells extracted from adult human tissue, which means that isolation (unlike embryonic stem cells) can be done in an ethically acceptable way. Due to their capability to differentiate into new cell types, stimulate cell growth and influence the human immune system, they hold much promise for regenerative cell therapy.
The expansion of these cells, however, is a long and labor-intensive process. What is more, researchers have to deal with variations in the biological material that originates from many different donors. This variability is further increased by deviations in the cell treatment in manually produced cultures. At the same time, human interaction raises the risk of error and limits reproducibility. Additionally, as cell cultures are living organisms, a cleanroom environment is essential, which requires special standards for instruments and devices.
THE SOLUTION
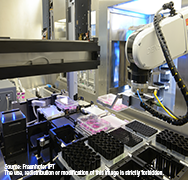
The solution is the development of a fully automated, self-contained yet flexible system for cultivating stem cells. StemCellDiscovery is a globally leading pilot project launched by the Fraunhofer Institute for Production Technology (IPT) in Aachen, Germany. The Aachen facility aims at growing and researching MSCs, and implementing various lab processes – from cultivating cells to generating experimental data. The facility features the easy integration of devices; consistent and accurate reproducibility; an individual, modular-based control of processes; high-quality cell products; and the use of advanced measuring technology for quality assurance and analysis.
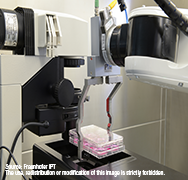
A DENSO robot plays a central role in the facility. The robot, a VS-087 model, serves as a flexible handling unit for all transportation steps in the platform: transporting cell cultures in multititer plates, moving falcon tubes between different processing and measuring devices, and ensuring highly accurate positioning. Precision is particularly important at the microscope, where the robot first grips the cell culture container and then positions it in the designated holder. The robot’s flexibility also is useful for pre-positioning resources, such as transporting pipette tips from the storage to the liquid handling unit.
In addition, the robot provides the service for shaking the cell cultures with the same speed and movement in order to distribute the cells equally. This is key, as an inconsistent movement could result in cells accumulating at the edge of the container, leading to suboptimal conditions for cell growth. To achieve a consistent distribution of cells in the container, it is important that the robot applies constant acceleration to the cultures.
As the facility relies on the interaction of the devices, their integration plays an important role. In order to maintain a high level of flexibility in the overall system, a service-based software architecture was implemented. An adaptive, specially designed software system controls all processes. It can respond flexibly to indicators for cell culture such as cell growth and, if necessary, execute individual services following a modular approach. These services are provided by all devices via an Integration Framework, which allows the user to create any combination of services at the control level. Each device offers services with defined parameters that can be controlled manually via the intuitive user desktop or assembled into complex combinations. In- and outgoing data collected from the devices are provided in a universal format so users can control all devices from a single desktop – whether it is the microscope or the DENSO robot, the liquid handling unit or the incubator and repositories. The software has been programmed in C#, which makes it possible to abstract complex logical relationships and implement object-oriented programming.
The Integration Framework also includes the VS-087. Due to its intuitive interface, it can replicate the robot’s real-world services in the facility. The robot is controlled by the built-in RC8 controller. The interface communication is based on ORiN2 and the option of implementing control via C# (easily embedded into the software architecture). The software also assumes the full control of the robot: Any variation in the processes can be detected and resolved immediately. The Integration Framework sends activity protocols to the control software that provides users with status information, among other data.
The VS-087 was selected primarily because of its programmability and easy integration capabilities. To automate the manual processes in the facility, various devices had to be included. As is typical for innovative research, the selection of these devices was made long before the actual software development was launched. Hence, it was important that a robot was implemented that can be programmed flexibly as requirements change. Cleanroom compatibility was also crucial. Last but not least, the VS-087 allowed for the design of a compact facility. The multi-functional gripper designed for this purpose can, thanks to robotic kinematics, be moved to any spot within the facility, ensuring the highest levels of precision.
The programming of the DENSO robot also permits a high level of sensor integration and, thus, opens up new opportunities for self-optimization. In all likelihood, this will significantly optimize process stability. Due to the direct connection between sensor and robot, both gripper operations and path planning during movement can be controlled. This will support process stability considerably in self-contained, sterile facilities such as this one.
THE RESULT
During the implementation of the StemCellDiscovery project valuable experience could be gained in the context of innovative control technologies for automated laboratories. The industrial robot is technically reliable and provides the flexibility required for handling all types of materials and products. This experience will not only advance research; it will also help the medical and pharmaceutical industries to develop new products.
Finally, the VS-087’s service-oriented architecture and flexible handling support enable the realization of a variety of processes. In the future, the cultivation of other cell types can be implemented and external users will be able to work at the facility with short lead times. Furthermore, standardized and validated function modules will be available, providing standardized protocols for the generation of cell products that meet industrial standards.
A special emphasis has been placed on communication between different components in the facility. This is essential for an efficient modular approach and additionally promotes adaptability. In the world of Industrie 4.0, interconnecting devices and machines is a requirement for innovative research.
In the future, the facility will potentially deliver new insights using statistical methods (BigData and Analytics), which promise to advance and quicken the search for innovative therapies.