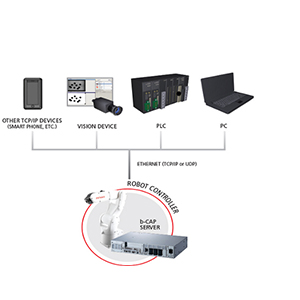
b-CAP is based on the Transmission Control Protocol / Internet Protocol (TCP/IP)
This protocol allows you to connect to DENSO robots and peripheral devices using a PC, PLC or other device that includes TCP/IP or UDP Ethernet.
With b-CAP you can control the robot directly by sending a target location at short intervals using your own kinematics calculations in real time.
It works completely independent of any platform (iOS, Linux, Windows, etc.) or programming language.
Key benefits
- Very flexible and powerful control via PC, PLC or other applicable hardware TCP/IP or UDP
- Independent programming platform and language
- No need to learn a new programming language
- Real-time control of robots