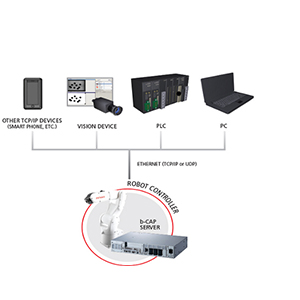
b-CAP est basée sur Transmission Control Protocol / Internet Protocol (TCP / IP)
Ce protocole permet de vous connecter aux robots DENSO et les périphériques en utilisant un PC, PLC ou autre dispositif qui comprennent Ethernet TCP / IP ou UDP.
Avec b-CAP vous pouvez contrôler le robot directement par l’envoi d’une position cible à de courts intervalles en utilisant leurs propres calculs de cinématique en temps réel.
Opère complètement et indépendamment de toute plate-forme (iOS, Linux, Windows, etc.) ou autre langage de programmation.
Avantages clés
- Contrôle très flexible et puissant via un PC, PLC ou autre dispositif hardware où estapplicable le protocole TCP / IP ou UDP.
- Plate-forme et langage de programmation indépendants.
- Vous n’avez pas besoin d’apprendre un nouveau langage de programmation.
- Contrôle en temps réel des robot